


GPSlug
-
Posts
388 -
Joined
-
Last visited
Posts posted by GPSlug
-
-
It's manual. (menu, menu, setup, time IIRC)
-
The datum you need for paper maps might be some flavor of ED50 (European 1950).
If not, or if the transformation in the receiver isn't good enough, you might be able to calculate the user grid offset from this utility, which has a pretty big list of datums in it.
-
Just a stab in the dark, but here are a couple of things to try.
From the Device Manager listing, right-click|Properties on the port. Select the Port Settings tab and Restore Defaults. You could also try turning off or tweaking the FIFO buffer settings through the Advanced button.
-
Actually, I've been thinking that a disposable diaper would be a good thing to leave in a cache that had gotten damp.I agree!! Someone left me a poker chip(and took something nice). I found a diaper (unused) in a cache.
Find a wet cache, wrap the contents in a diaper to dry them off. If it was a one time leak (e.g. someone closed the container poorly), once the the moisture is absorbed the diaper can be thrown away. If it is a chronic problem, it would help "lock away the moisture" until the owner can do maintenance. Although, sanitary napkins would be more compact to keep handy for this situation.
But I wouldn't consider a diaper that's been sitting in a grimy box good as a trade item. Who would put that on their kid?
-
I assume you've tried Settings|System|Brightness?
-
Metroguide doesn't need a key, so you can re-use that.
-
There is one exception to the Metroguide paradigm, and that is Metroguide Canada. It uses different coastline data (DMTI Spatial vs. Navteq) and it autoroutes.
Older versions of Metroguide (Canada is v4) will autoroute on their own. But they are getting pretty old.
-
Yes, you'll be able to route and is quite usable on the road. And if you keep your other MicroSD card handy, you can swap in the topo when you need it.
Another option is that you can enable the routing on Metroguide (MetroWizzz). Or you could do that first just to see if you like how the 60CSx does routing (although it can pick slightly different routes between Metroguide and CN).
-
The thing about using WAAS...it ONLY works if the person who placed the cache used it too. And since most don't...what does WAAS really do for you? No matter what you will be close enough to locate any cache.
And since most don'tThat is an interesting claim
I have never seen a box to check asking if I used WAAS when placing a cache. I have never seen a study to determine which caches had been placed using WAAS.
If the cache was placed on a day with a quiet ionosphere, and you're searching on a day with an active ionosphere, WAAS will certainly help you whether the placer was using it or not.
Even if the cache was placed on a bad day, how would compounding the error by having your position be worse not hurt you? It's not like you're going to be wrong in exactly the same direction. That's like saying, "the placer powered up their receiver at the cache site and recorded the first position it calculated, so I should do that too."
-
The problem with speed readings from a GPS is that it isn't continous or instantaneous. It simply compares where you are now to where you were at the last reading and computes what your average speed was to get you there. Now I do admit that a modern GPS does all of that in under 1 second. That makes it pretty good but not perfect. Radar is doing that same calculation but many times per second.That is why courts do not tend to give much weight to GPS data over radar data.
This is incorrect. A GPS receiver calculates speed using the Doppler shift of the GPS signals, similar to the method used for the radar gun.
It's done both ways, but Doppler is certainly much more common these days.
-
The one my surveyor uses - accurate to within 5mm (that's right, not 5 meters, 5 millimeters)
How much are those?!?
if you have to ask, you can't afford it.
as in, thousands...
Plus you need to be licensed by the Government.
No, you don't.
-
For northern temperate latitudes, you're generally better off on the south side of the plane.
GPS orbits are inclined at 55 degrees, meaning they won't be farther north than that. So more satellites will be south of you than to the north.
This is just in general terms, though. At any given time it could be that there are more to the north of you.
-
Bottom line on what's OK to do with a travel item is what's OK with the owner. If you're doing what's asked on the traveler's page, you're good.
-
I'm using a 30-day free trial of translation software from Promt so I can have the translated data when I'm not connected to the internet.
I'm generating the html descriptions from GSAK and translating those files in bulk using their "Professional" package. But you can supposedly also translate XML files like GPX.
Another option is their Pocket Promt which runs on Windows Mobile, but you would have to copy and paste selections of text to translate.
-
Just a note for accuracy's sake. The article provided says 300 kilometers above where they started versus 300 miles as mentioned previously. The difference between the two would be about 164 miles less in the radius of the orbit.
And for reference, a GPS orbit has radius of about 26,500 km - or about 20,000 km from the surface.
Geo-synchronous is around 42,200 km radius.
-
Thanks! It would actually be cool to load my Legend with the Topo maps and route with those.I guess if my 60CS breaks I'll have to research how to make Metroguide work. I still think it's a ripoff that they don't let you buy that option with Metroguide. So I agree with you. As soon as there is a better option it's bye-bye forever to software locked to one GPS even if you sell it.
Just search the forum for "metrowizzz" and start waving bye-bye...

Unfortunately, if you have a black and white Legend, it won't autoroute no matter what you do. The unit just isn't capable of it.
Metrowizz tweaks the map, not the GPSr. It would allow you to autoroute with Metroguide on, say, a Legend C or another GPSr that's autorouting capable.
-
Make sure whatever you use is transparent at 1-2 GHz. Not all plastics are. Maybe test it out by dipping a film canister first and see if you get any decrease in signal strength when you cover the antenna.
-
I think there are about a dozen erratic earthcaches within an hour drive from Calgary. This one, for example.
I'm sure you could get some listing ideas from those.
-
And in the case where you have an unknown receiver time offset, the infinite number of spheres intersect on a surface containing an infinite number of circles all centered on the line between the satellites. I think it might be a hyperboloid, because the difference in the distance to the two foci is constant.Three spheres CAN intersect at one point, but it can also intersect two.
Two Sats - "known" distance from two locations. Two spheres intersect in a circle:
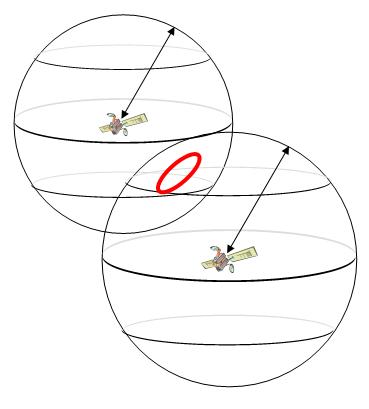
Here the intersection with unknown time would be a curve. I'm having a hard time visualizing it, but it's probably still some kind of conic section. Anyone want to derive it?Three Sats - "known" distance from three locations. Third sphere can intersect the circle in 0, 1 or 2 points:
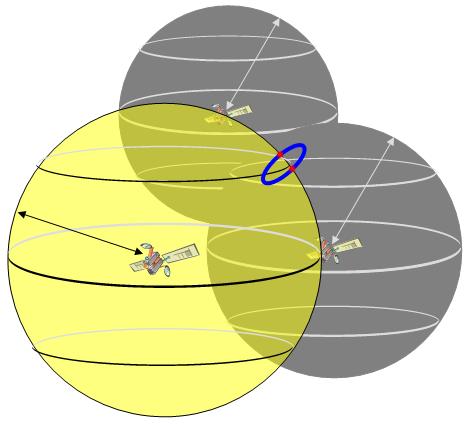
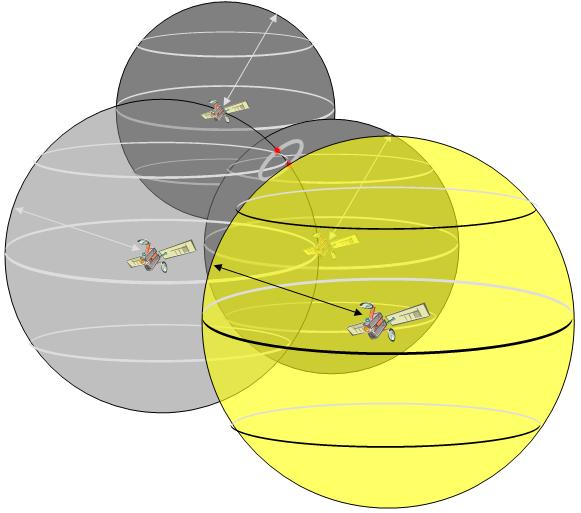
And then we get two points on the previous curve, one of which you're unlikely to converge to if your on or near the Earth's surface.Four Sats - "known" distance from four locations. Fourth sphere determines which of the two possible points is a true position:
All of this trying to think geometrically in 4 dimensions is giving me a headache. Having equations to linearize and iterate on is actually much easier.
-
You can get longer names if you make them Custom POIs instead of waypoints. Search around this forum and on GSAK's for how to do it.
-
Magellan used to make a version of their GPSCompanion that would clip onto a Palm m500 series. You might be able to find one on eBay.
But it's kind of old technology at this point and may not be worth it.
-
tozainamboku came in while I was typing, but here's my post anyway
Really? If you know the location of a satellite, and you know the exact time the transmission commenced (atomic clocks in the sats) and you know the time lag, and you know the approximate speed of the signal - you should know a fairly accurate distance from the satellite, right?True. But in order to know the time lag, you need not only a precise time the signal left the satellite (which you calculate from the NAV message and the code phase) but also a precise time you received the signal. The receiver clock offset is what you need to solve.
The clock in your receiver that keeps track of time while it's turned off is really no better than a cheap digital watch. Say it loses one second after being off for a day. That means that your time of reception, and therefore your time lag and range, is off by 300,000 meters. Each nanosecond of clock error is a foot of range error. Even just going through a tunnel for a few seconds, the crummy little crystal oscillator in your GPSr is going to drift enough to be not very good for positioning.
You can make a receiver that's hooked up to an atomic clock or even just a high quality ovenized crystal oscillator to keep track of your receiver time better, but that's bulky and expensive. But that's the beauty of GPS. You don't need a good clock because you can just calculate the time.
So in this example, there's an accurate clock at the starting position at mile marker 35 and the guy on the motorcycle wrote down the time as he passed it, say 3:52. When he gets to you, you look at the time on your sundial which says 4:15. So you don't know the real distance he traveled, just some erroneous "pseudo" distance: 23 minutes * 1/3 milesperminute = 7 2/3 miles.If you have a motorcyle moving at precisely 20 mph and it starts from a known position and travels 2 minutes, you should know that it travelled precisely 2/3 miles. Fixed location, known speed, known travel time should equal known distance traveled.But another 20 mph motorcycle is coming from the other direction on the road and arrives at the same time. It started at mile marker 36 at 3:53. So you think that distance is 22 * 1/3 = 7 1/3 miles.
You don't know yet that your are actually on the 2/3 mile point between these to motorcycle start points. What you do know is that you live in a one dimensional universe (a road) and that
35 + 7 2/3 + ClockError = WhereIAm
and
36 - 7 1/3 - ClockError = WhereIAm
(The sign change is necessary because it's going the other direction. Sorry this is a bit hand-wavy, but you can see that any travel time going in that direction should be making the mile markers lower. Same with ClockError; bigger ClockError will make the mile marker bigger for the first motorcycle and lower for the second.)
So two equations and two unknowns. A little algebra and you have 2*ClockError = 36 - 7 1/3 - 35 - 7 2/3, or ClockError = -7 minutes. Plug that back into either equation and you have WhereIAm = 35 2/3. Hooray!
And you also now know that the precise time when the motorcycles arrived was 3:54. Woohoo!
Admittedly, there are variances for atmospheric conditions, but I don't think that the unknown time offset is what is necessitating the fourth measurement.It's the same idea in 3-d, but the math gets harder.
(x,y,z) = my position (unknown)
(xn,yn,zn) = position of satellite n (known)
Pn = pseudorange to satellite n (measured bad distance affected by clock error)
c = receiver clock error (unknown)
en = other errors: atmospheric delay, satellite clock and orbit errors, multipath, etc. (estimated)
So for four satellites you have
P1 = squareroot( (x-x1)^2 + (y-y1)^2 + (z-z1)^2 ) + c + e1
P2 = squareroot( (x-x2)^2 + (y-y2)^2 + (z-z2)^2 ) + c + e2
P3 = squareroot( (x-x3)^2 + (y-y3)^2 + (z-z3)^2 ) + c + e3
P4 = squareroot( (x-x4)^2 + (y-y4)^2 + (z-z4)^2 ) + c + e4
and you can solve for your four uknowns: x,y,z, and c.
With more satellites you can average out the other errors better. Where WAAS helps is getting better estimates of some of these errors.
-
Known distance from one location = any where on a sphere : infinite points
Known distance from two locations= points where the spheres intersection (a circle or single point) : infinite points
Known distance from three locations= points where a sphere intersects a circle): one or two points
Known distance from four locations= points where a fourth sphere intersects one of the two possible points: one point
So the GPS can guess from 3 satellites since one point is fairly stationary and the other incorrect position will be moving at an incedibly fast speed out into space. With four satellites, you'll get a fairly stable and accurate position lock.
That's not quite it. The problem is that you don't have a known distance. For each of your known distances you have an unknown time offset added to it. Time is the fourth unknown that necessitates a fourth measurement.
With three satellites, you can get an inaccurate position by assuming that your height hasn't changed since the last time you calculated position. That reduces it to three unknowns, so three satellites are sufficient. But if you're a few hundred meters higher than you were the last time you got a position, your 3-satellite 2-d position is going to be pretty bad.
-
The quickest setup to cobble together might be webcam-laptop-projector.

Missing Caches found
in General geocaching topics
Posted
Apparently the old adage needs to be updated.
Because it may take some time, but eventually two Wongs can make it right.